 Цивилизация
Цивилизация










Вакуумные присоски, многим известные с детства, находят широкое применение в промышленности, в том числе при изготовлении всевозможных лазающих роботов. В их основе лежит создание разницы давления между атмосферой и областью, ограниченной присоской и поверхностью.
Первым огромную силу, создаваемую вакуумом, продемонстрировал в 1654 году немецкий физик Отто фон Герике, который при помощи изобретенного им воздушного насоса откачал воздух из двух медных полушарий, тесно прижатых друг к другу.
После выкачивания воздуха разорвать полушария не смогли 16 лошадей, запряженных с двух сторон.
Сегодня работающие по тому же принципу присоски используются во всевозможных манипуляторах для подъема и перемещения предметов, в сельском хозяйстве, в хирургии и других областях. Присоски хорошо работают на гладких поверхностях, однако главной проблемой в их использовании становятся утечки воздуха, которые неизбежно возникают в случае, если поверхность шероховатая. Чтобы минимизировать утечки воздуха, конструкторы стараются прижимать присоски к поверхности с большей силой, а края делают гибкими, чтобы минимизировать перемещение воздуха в область с пониженным давлением. Однако полностью избавиться от вредных утечек все же не удается.
Физики из Чжэцзянского университета (Китай) разработали принципиально новый вид присосок, в которых герметичность откачанной области обеспечивается путем создания кольца быстро вращающейся воды.
Этот метод использует центробежную силу вращающейся жидкости, которая служит своеобразным уплотнителем, закупоривает все имеющиеся неровности и препятствует утечкам воздуха.
«Чтобы устранить разницу давлений в пограничной вакуумной зоне, давление на границе должно быть равно атмосферному, в то время как в самой зоне должен поддерживаться вакуум», — пояснили ученые. В центре новой присоски имеется мотор с лопастями, который призван раскручивать поступающую воду до скорости 90 оборотов в секунду, и насос, откачивающий воздух для создания разрежения. Вода при этом поступает из специального резервуара.
«У нашего метода есть множество применений, однако мы считаем, что ползающий по стене робот будет наиболее полезным, — указывают физики. — По сравнению с другими карабкающимися роботами, робот с нашей присоской достигает удивительно высоких результатов».

Использование нового метода позволило выполнить более экономичные с точки зрения потребления энергии электрические присоски и сделать их более легкими и меньшими по размерам, чем имеющиеся на рынке.
К примеру, одна инновационная присоска массой 0,8 килограмма оказалась способна создавать усилие в 245 Ньютонов на грубой поверхности, используя для этого всего 400 Ватт электроэнергии.
При этом традиционная промышленная присоска с аналогичным усилием потребляет несколько килоВатт энергии и весит десятки килограммов.
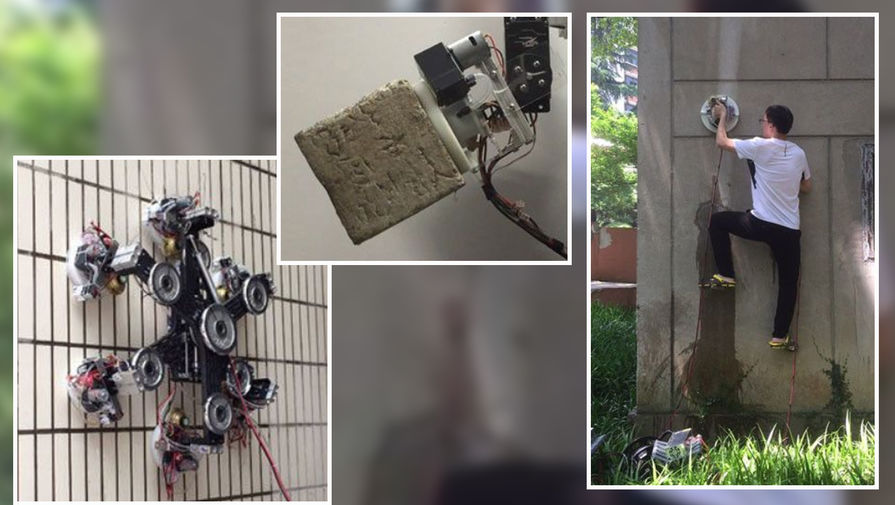
Преимущества нового метода китайские ученые продемонстрировали, изготовив три вида присосок — рука-манипулятор, способная брать и перемещать предметы, ползающий по стенам робот-гексапод и прибор, позволяющий человеку лазать, как Человек-паук.
Устройство, позволяющее человеку лазать по стенам, весит всего три килограмма, создает усилие в 2000 Ньютонов и потребляет 650 Ватт.
На представленном ролике видно, что каждый раз, когда присоска отлипает от поверхности, из-под нее вытекает часть воды. Это обусловило главную сложность в использовании новых устройств — необходимость постоянного снабжения водой. Теперь ученые работают над снижением потребления воды, чтобы сделать присоски более независимыми от ее запасов и способными к индивидуальному использованию человеком. Работа ученых опубликована в журнале Physics of Fluids.