 Цивилизация
Цивилизация









Ученые из Университета Торонто рассказали об устройстве тонких и длинных змееподобных роботов. Об этом сообщает пресс-служба университета.
В отличие от человекоподобных роботов, змееподобные механизмы имеют длинное тело без конечностей, что позволяет им проникать в труднодоступные места. Джессика Бургнер-Карс и ее коллеги работают над целым семейством таких роботов диаметром несколько миллиметров, способных нести инструменты и расширяться.
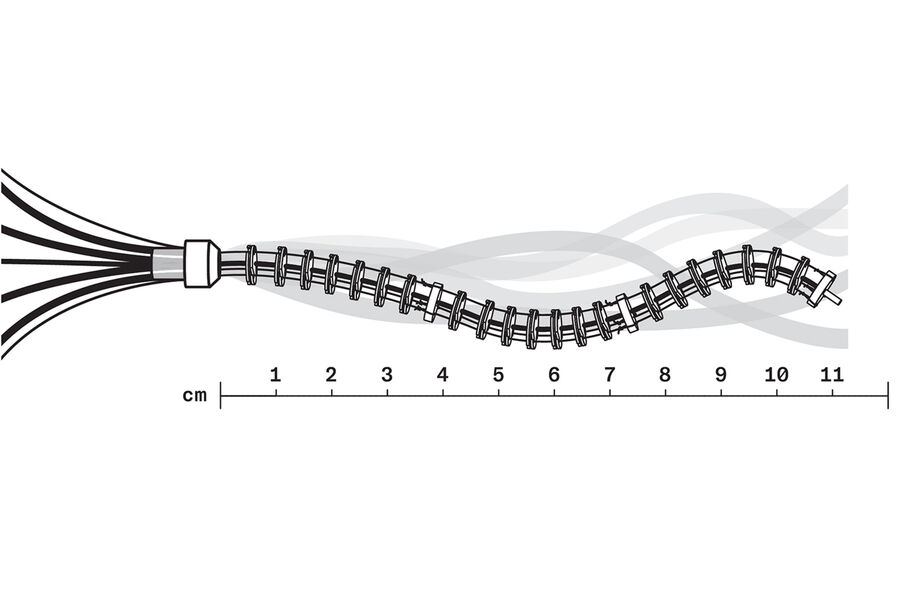
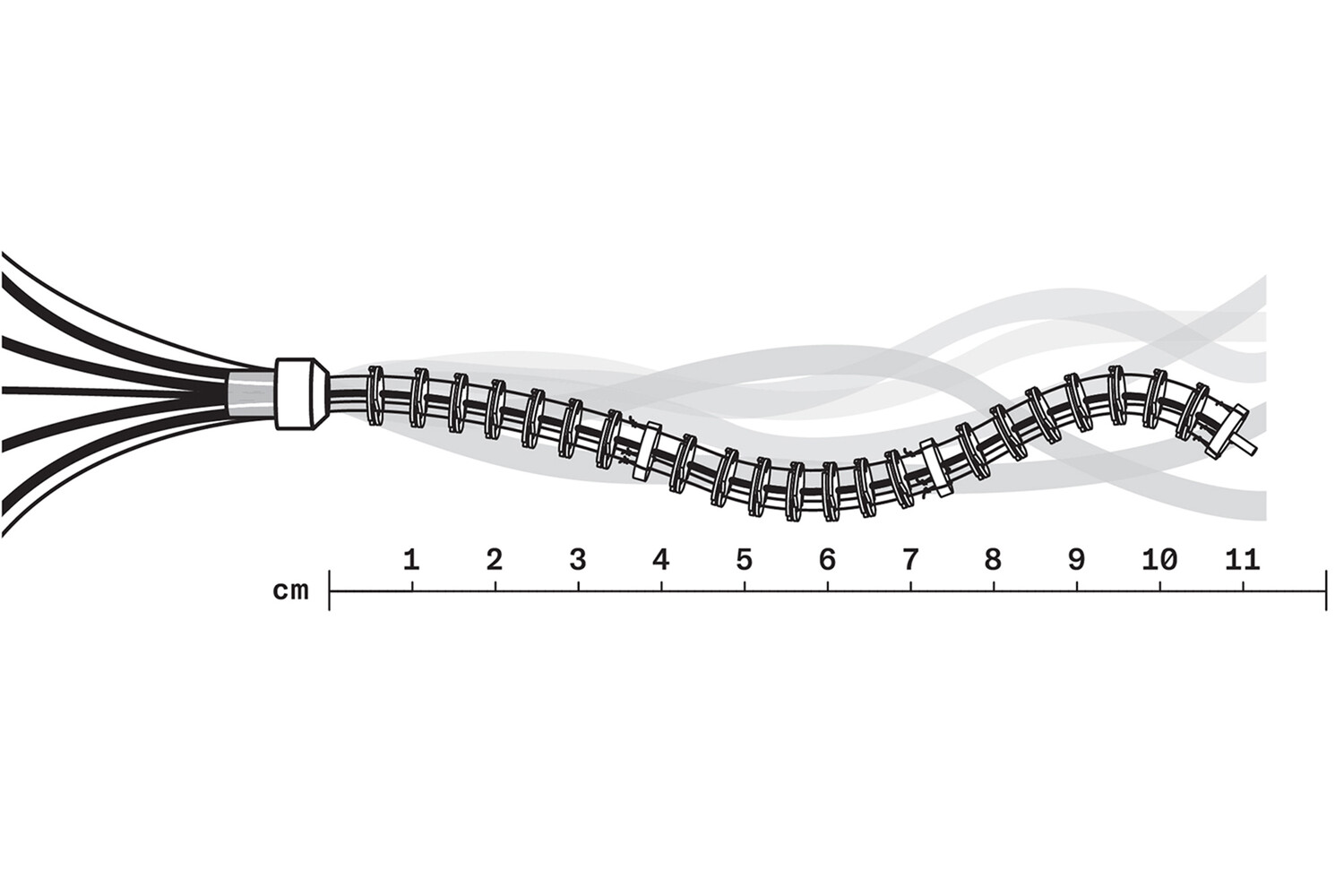
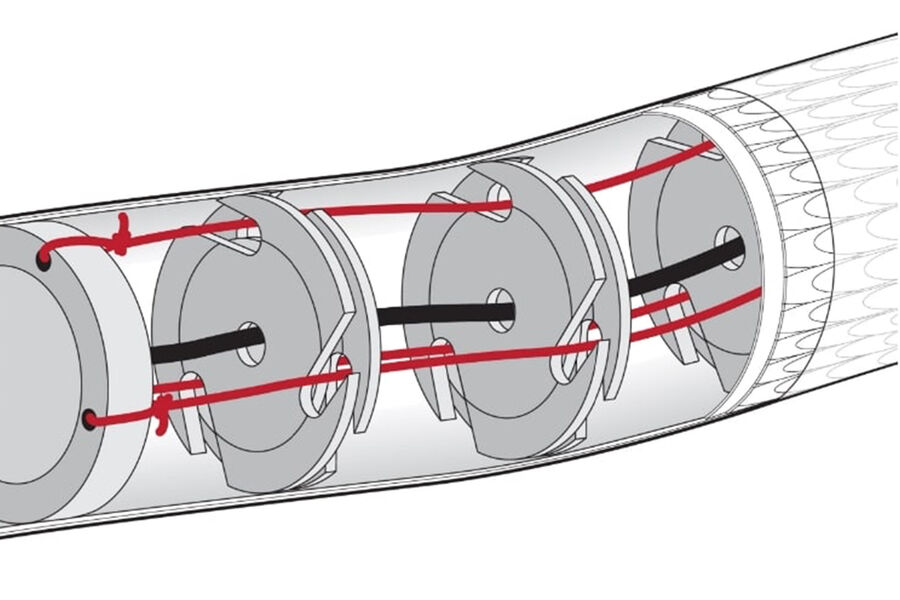
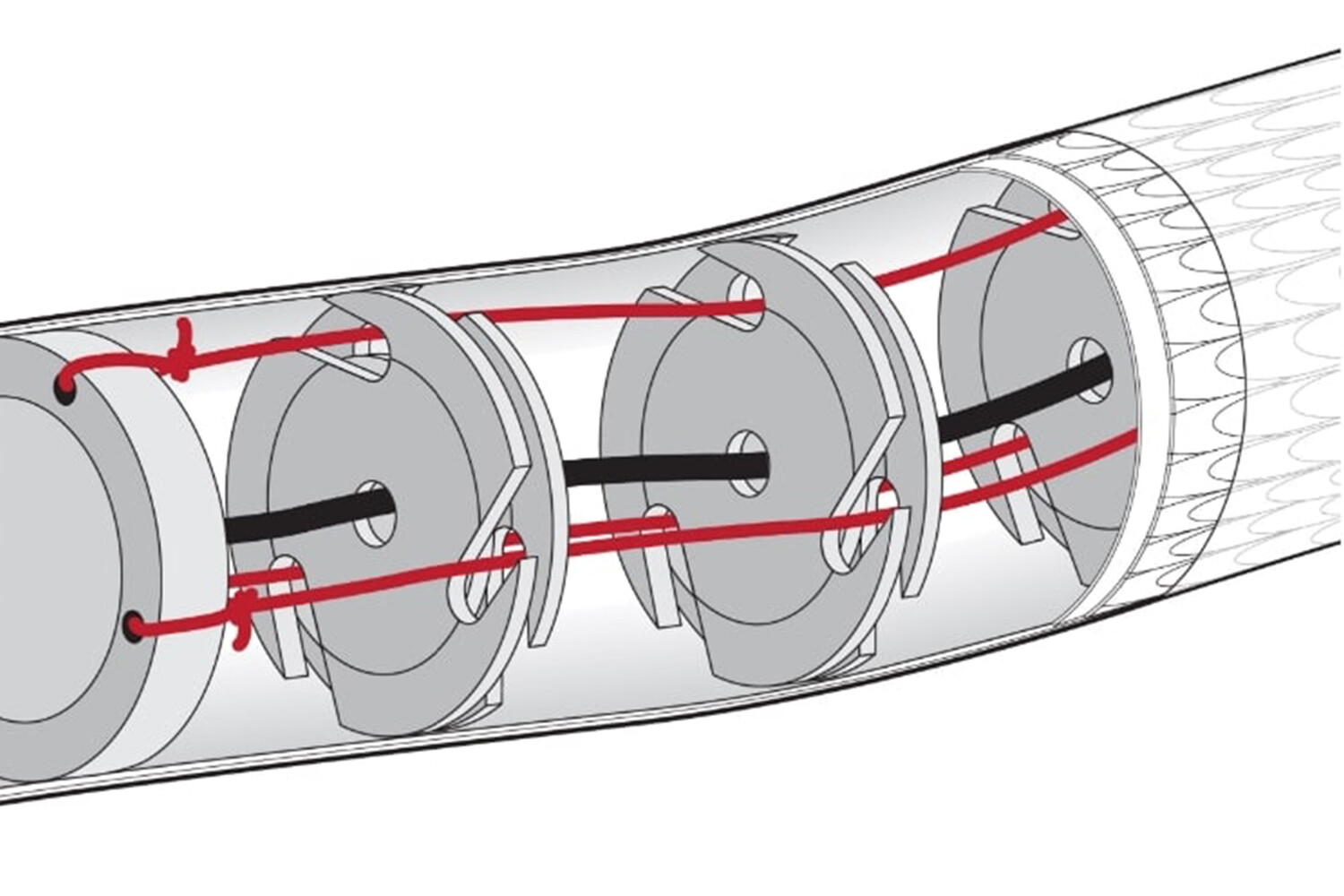
Нити, проходящие через тело робота, прикрепляются к толстому диску в каждом сегменте тела. Эти нити могут создавать тягу, чтобы управлять отдельными сегментами робота и изгибать их в разные стороны. Магниты внутри каждого диска, расположенные с чередованием полярностей, гарантируют, что диски остаются удаленными друг от друга. Это помогает роботу изгибаться по желанию и перемещаться по криволинейной траектории, причем тело следует в точности по траектории головы. Кроме того, лаборатория разработала оболочку из перекрывающихся чешуек, зажатых двумя слоями силикона. Когда между слоями силикона создается вакуум, чешуйки фиксируются, и гибкий робот твердеет.
Ученые надеются, что помощью этих роботов можно будет проводить медицинские операции внутри человеческого тела без крупных разрезов, обследовать внутренние органы или же проверять состояние механизмов.